¡Hola a todos! Hoy vamos a sumergirnos en el fascinante mundo de los motores eléctricos, específicamente aquellos que impulsan el transporte eléctrico. Es un tema crucial para el futuro de la movilidad sostenible, así que vamos a explorarlo a fondo. Empezaremos con los motores de corriente continua.
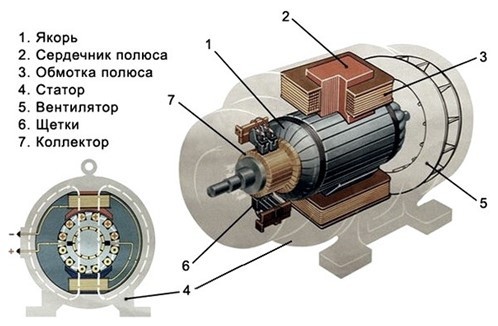
Los motores de corriente continua, o motores DC, son conocidos por su simplicidad y control preciso de la velocidad. Su funcionamiento se basa en la interacción entre un campo magnético estático y un campo magnético rotatorio generado por la corriente que circula por la armadura. Este diseño permite un control directo de la velocidad mediante la variación de la corriente. Tradicionalmente, los motores DC se han utilizado en aplicaciones de baja potencia, como vehículos eléctricos pequeños o incluso algunos trenes. Sin embargo, su eficiencia puede ser menor comparada con los motores de corriente alterna, especialmente a altas velocidades. Además, requieren un sistema de conmutación mecánica, que implica desgaste y mantenimiento periódico. A pesar de estas limitaciones, los avances en la tecnología de los motores DC sin escobillas (brushless DC motors) han mejorado significativamente su eficiencia y durabilidad, haciéndolos una opción viable en ciertas aplicaciones del transporte eléctrico, especialmente en vehículos con requisitos de potencia moderada y control preciso de la velocidad a bajas revoluciones. Piensen en scooters eléctricos, bicicletas eléctricas o incluso algunos autobuses urbanos. La simplicidad de su control y su capacidad para ofrecer un par elevado a bajas velocidades son ventajas significativas.
Ahora, pasemos a los motores de corriente alterna, o motores AC. Estos motores son los reyes del transporte eléctrico moderno, especialmente en vehículos de mayor potencia como coches eléctricos y camiones. Existen diferentes tipos de motores AC, pero los más comunes en el transporte eléctrico son los motores de inducción (o motores de jaula de ardilla) y los motores síncronos de imán permanente. Los motores de inducción son robustos, fiables y requieren poco mantenimiento. Su funcionamiento se basa en la inducción electromagnética, donde un campo magnético rotatorio en el estator induce corrientes en el rotor, generando un par motor. Son ideales para aplicaciones que requieren un alto par de arranque y una operación a velocidades constantes. Sin embargo, su control de velocidad puede ser menos preciso que el de los motores DC. Por otro lado, los motores síncronos de imán permanente ofrecen una mayor eficiencia y un control de velocidad más preciso. Estos motores utilizan imanes permanentes en el rotor, lo que elimina la necesidad de excitación por corriente, mejorando la eficiencia general. Su control preciso de la velocidad y su alta densidad de potencia los convierten en una opción popular para vehículos eléctricos de alto rendimiento, donde la eficiencia y la optimización del consumo de energía son cruciales. En resumen, la elección entre un motor de inducción y un motor síncronos de imán permanente depende de las necesidades específicas de la aplicación, considerando factores como la potencia requerida, la eficiencia deseada, el control de velocidad necesario y el coste. Ambos tipos juegan un papel fundamental en la revolución del transporte eléctrico. Y aunque la tecnología sigue avanzando, estos dos tipos de motores dominan el panorama actual. Es fascinante ver cómo la innovación en estos motores está impulsando un futuro más limpio y sostenible para el transporte.
¡Hola a todos! Hoy vamos a sumergirnos en el fascinante mundo de los motores eléctricos que impulsan el transporte eléctrico. Hablaremos de tres tipos principales: los motores asíncronos, los motores síncronos y los motores universales. Empecemos con los asíncronos.
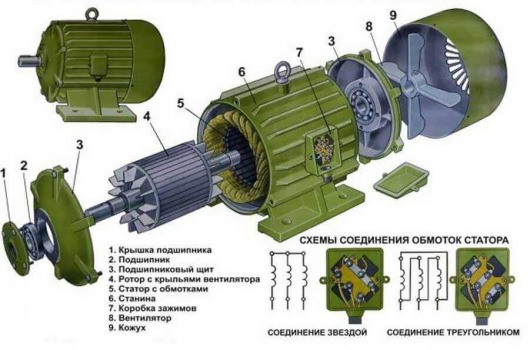
Los motores asíncronos, también conocidos como motores de inducción, son los reyes del transporte eléctrico, especialmente en vehículos eléctricos de bajo coste. Su popularidad se debe a su simplicidad, robustez y bajo precio. Funcionan gracias a un campo magnético rotatorio generado en el estator, que induce corrientes en el rotor. Este rotor, generalmente formado por un conjunto de barras de cobre cortocircuitadas, gira a una velocidad ligeramente inferior a la del campo magnético rotatorio, de ahí el nombre «asíncrono». Existen diferentes tipos de motores asíncronos, como los de jaula de ardilla, muy comunes en los vehículos eléctricos, y los de rotor bobinado, que ofrecen un mayor control de la velocidad. Una de sus ventajas es su facilidad de mantenimiento, ya que no requieren escobillas, lo que reduce el desgaste y el mantenimiento. Sin embargo, su eficiencia puede ser ligeramente inferior a la de los motores síncronos, especialmente a bajas velocidades. Además, el control preciso de la velocidad puede ser más complejo que en los motores síncronos. Pero para aplicaciones como coches eléctricos urbanos, su relación coste-eficiencia es inmejorable. Piensen en la gran mayoría de los vehículos eléctricos que circulan por nuestras calles; muchos de ellos utilizan este tipo de motor.
Ahora, pasemos a los motores síncronos. Estos motores son conocidos por su alta eficiencia y su capacidad para controlar con precisión la velocidad y el par motor. A diferencia de los asíncronos, el rotor de un motor síncrono gira a la misma velocidad que el campo magnético rotatorio del estator. Esto se logra mediante imanes permanentes o mediante una excitación eléctrica. Los motores síncronos de imanes permanentes son muy populares en vehículos eléctricos debido a su alta densidad de par y su eficiencia, especialmente en aplicaciones que requieren un alto rendimiento, como vehículos eléctricos de alta gama o vehículos híbridos enchufables. Sin embargo, su coste suele ser superior al de los motores asíncronos. Además, la temperatura de funcionamiento de los imanes permanentes puede limitar su rendimiento en ciertas condiciones. Los motores síncronos con excitación por corriente continua ofrecen una mayor flexibilidad en el control de la velocidad y el par, pero requieren un sistema de excitación adicional, lo que aumenta la complejidad del sistema. En resumen, los motores síncronos son una excelente opción cuando la eficiencia y el control preciso son primordiales, aunque su precio es un factor a considerar.
Finalmente, tenemos los motores universales. Estos motores son capaces de funcionar tanto con corriente continua como con corriente alterna. Su diseño es relativamente simple y se basan en la utilización de escobillas y un conmutador. Aunque son menos eficientes que los motores asíncronos y síncronos, su simplicidad y bajo coste los hacen atractivos para ciertas aplicaciones, aunque su uso en el transporte eléctrico es menos frecuente que los dos tipos anteriores. Suelen utilizarse en herramientas eléctricas portátiles, pero en el ámbito del transporte eléctrico su aplicación es más limitada debido a su menor eficiencia y mayor mantenimiento requerido por el desgaste de las escobillas. Sin embargo, en algunos vehículos eléctricos pequeños o en sistemas auxiliares, pueden encontrar su nicho. El mantenimiento de las escobillas y el conmutador es un factor a tener en cuenta, ya que implica un desgaste y un reemplazo periódico. En general, su uso en el transporte eléctrico es menos común debido a las limitaciones mencionadas.
Así que, ahí lo tienen: una visión general de los tres tipos principales de motores eléctricos utilizados en el transporte eléctrico. Cada uno tiene sus propias ventajas y desventajas, y la elección del motor adecuado depende de las necesidades específicas de la aplicación. Espero que esta información les haya sido útil.

- Читайте также: